Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinOptimizing the Selection of Optical Sensors for Object Detection
Optical sensors for industrial applications are becoming increasingly intelligent. Learn how new hardware, onboard software configuration, and touchscreens are unlocking new object detection capabilities.
As electronics technology has continued to shrink, there’s room for onboard logic that enables optical sensors to be programmed, perform multiple functions, and even process some information locally.
Different use cases call for different types of optical sensors, a product family that includes through-beam, retroreflective, and diffuse proximity sensors. Each has distinct advantages and can often be used in combination to leverage multiple of these qualities. When designing a sensor solution for object detection in a unique industrial environment, the object’s size, material, shape, surface finish, and color all have an impact on the sensor’s performance.

Figure 1. Optical sensors must be able to detect a wide range of objects, with settings to adjust the sensitivity and switching threshold for various conditions. Image used courtesy of SICK
Smarter, Smaller Sensors
The progression of Moore’s Law has seen electrical components get increasingly smaller, including transistors, thanks to silicon-based semiconductor technology. Just as complete, intricate systems can be fit onto microchips, sensor components have also been miniaturized.
These recent advances have allowed for a great deal of onboard intelligence – tinier, simple sensors can be programmed to perform multiple functions and do some onboard information processing at the device level in combination with advanced detection and signal processing techniques, and intelligent algorithms and artificial intelligence (AI). Smarter sensors open opportunities for a broad range of applications in industrial settings.
Advancements in sensor detection create possibilities for a multitude of object detection scenarios, each one impacting the sensor type selection and design considerations.
Many Options for Object Detection
There are three major categories of industrial optical sensors. They can be used alone or in combination under varying conditions, since each has unique advantages and disadvantages.
Through-Beam Sensors
A through-beam photoelectric sensor consists of two parts: an emitter and a receiver which must be aligned and pointed at each other. The emitter sends out light, usually in the red or infrared (IR) spectrum from an LED or laser diode. Any object passing between the emitter and receiver blocks the path of the light and turns off the sensor output. The output remains energized as long as nothing is in the path of the emitter and receiver.
Through-beam sensors typically have a longer detection range than retroreflective or diffused photoelectric sensor. With a focused laser output, these sensors can reach well into the hundreds of meters between the emitter and the detector.
Retro-Reflective Sensors
A retro-reflective sensor has an emitter and receiver in a single housing. The emitter generates a light beam which is reflected back to the receiver by a purpose-built reflector, optimized for the wavelength of light. Obstructing the beam with an object scatters the light and triggers a change in the state of the sensor output signal. As with through-beam sensors, the emitter and reflector must be properly aligned for the light to return properly.
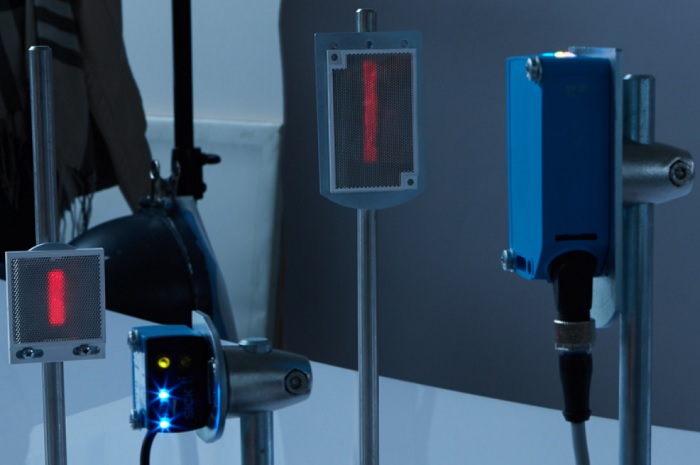
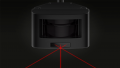
Figure 2. This retro-reflective sensor emits a 2D light beam to better capture object profile, not just presence. Image used courtesy of SICK
Retro-reflective sensors have limitations. Since the light must return back along the same path after reflection, the sensor has a shorter range than through-beam models. They are unable to detect highly reflective materials because those objects act just like the actual reflector, giving the false impression that a clear path exists between emitter and receiver. To minimize this effect, the beam must be polarized and reflected precisely by 90 degrees.
Diffuse Sensors
Diffuse proximity sensors emit an IR beam to detect the presence of objects within a certain range by measuring the intensity of light reflected by the object itself. Also known as diffuse sensors or reflective object sensors, these are well-suited for detecting objects in a broad range of industrial and automation applications.
Similarly to retro-reflective sensors, diffuse sensors consist of three key components. An IR LED sends out the signal, while an IR detector (usually a photodiode or phototransistor) receives the light, optimized to the same wavelength range as the emitter. Finally, a processing circuit amplifies the signal from the photodiode and may include filtering and logic analysis as well.
Sensor Selection Considerations
Aside from the technical electrical specs, the range, field of view (FOV), output type, response time, mounting, integration, and operating environment are all key considerations when developing a sensor solution for object detection.
Initially, you need to be sure that the sensor will provide the proper connection to the control system: discrete, analog, or another protocol like IO-Link. This is less of a chore in recent times since many sensors provide all kinds of outputs, or the company will provide a comprehensive catalog that includes all signal types.
Ambient Conditions
Object detection sensors can be affected by ambient light, including fluorescent lighting and sunlight, so it’s important to account for any light interference. The reflectivity of a target object will also have an impact on sensor performance; the texture and color of the target object can be too absorptive or too reflective.
Detection Range
You must select a sensor with sufficient detection range that can also account for variations in object material, reflectivity, position, and size. The latter two will impact the FOV, requiring calibration in the alignment of the sensor.

Figure 3. The object to be sensed (clear and shiny) and the ambient light condition dictate certain kinds of sensors and light sources. Image used courtesy of SICK
Alignment Angle
Alignment is also crucial for ensuring sensor performance and accurate detection. Measured in degrees, the angle determines the spread of the beam emitted by the sensor. The narrower the beam, the better the accuracy, but using a narrow beam requires precise alignment with the target object or reflector.
Response Time
The application requirements will determine how fast the sensor must respond, especially in high-speed dynamic environments. Every application will have its own set of environmental considerations that will affect how well a sensor will operate, including smoke, condensation, humidity, and temperature. For some sensors with very quick repose times, it is necessary to pair them with high-speed input modules on the control system (PLC).
Resolution, Repeatability, and Hysteresis
Other sensor characteristics that must be considered include resolution, which is the smallest detectable change in distance that an analog output sensor can measure. Repeatability also matters; the sensor should be able to provide consistent detection results for the same object at the same distance. Setup of the sensors must also account for hysteresis, which is the difference between the object detection and object release points. Adjusting hysteresis helps prevent false triggering due to object vibration or movement.
Sensor Integration Scenarios
Through-beam, retro-reflective, and diffuse proximity sensors each have use cases at which they excel and can also be used in combination.
Through-beam sensors, with a strong and intense light transfer between emitter/detector, are well suited for environments with particulates like fog, dust, and dirt, such as monitoring transparent container volumes. Retro-reflective sensors are used to detect various objects at a medium distance, like luggage in conveyor systems, clear containers and bottling in a packaging facility, and vehicles at toll gates.
Diffuse proximity sensors are ideal for smaller and more precise scenarios throughout automation, including assembly lines, due in part to their foreground and background suppression capabilities. They are commonly used for detecting products, packages, or containers in logistics and material conveyance applications.
When selecting the optimal photoelectric sensor for object detection, it’s important to clearly define application requirements and balance them with environmental factors.
SICK Optical Sensors
SICK’s W10 photoelectric proximity sensors are examples of how newer sensors can incorporate multi-mode functionality and touchscreen displays.

Figure 4. Integrated touchscreen displays can simplify optical sensor installation, configuration, and maintenance. Image used courtesy of SICK
Situation-dependent teach-ins allow the sensors to adapt to different applications. The W10 sensors support multiple operating modes including:
- Speed mode for high-speed operation
- Standard mode for harsh environments
- Precision mode for precise positioning
- Foreground and background suppression
- Detection at a defined distance
- Detection of objects at different heights without increasing errors
As you can see from this discussion, advancements in electronics are enabling higher performance and more features in new, smaller optical sensors. The programmable nature of these products can also reduce the number of different parts you need to stock, simplify your supply chain, and allow you to adapt to ever-changing applications.