 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinRecent Collaborative Ventures Spur Highly-Capable Robotic Dexterity
Learn about two of the latest collaborative partnerships concerning the design, development, and training of robotic hand technologies with potential medical and industrial applications.
An international team of researchers has developed a novel two-fingered haptic robotic hand with servo-motor-led impedance control, delivering dextrous and timely object manipulation.
In a second robotic manipulation-based endeavor, researchers from Google DeepMind have teamed up with robotic technologist, Shadow Robot Company, to construct a robotic hand for use in artificial intelligence (AI)-based research, dubbed the Shadow Hand.
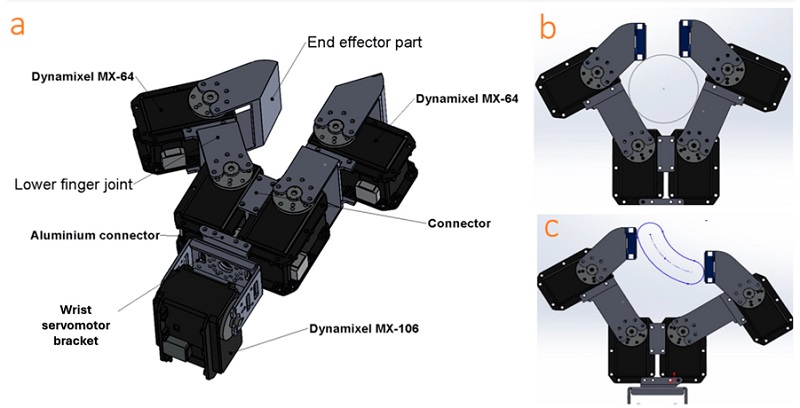
A 3D representation of the robotic hand constituted of both 3D-printed and aluminum parts (a). This image also depicts different manipulative positions for the grasping of objects (b). Image used courtesy of Mohammadi, V., et al, 2024
Advanced Haptic Technology
In robotic object manipulation through gripping/grasping, haptics refers to technology incorporating fine control and sensing of objects and their characteristics to exert the appropriate force to interact appropriately without causing damage. Essentially, haptic technology involves devices and concepts that mimic the sensitivity of human touch.
To incorporate haptic technology into robotic systems (whether for manipulating human tissues during surgery or picking/handling objects/parts in industrial facilities), several elements must be incorporated into their design:
- Tactile sensors (i.e. resistive, capacitive, or piezoelectric) are typically integrated into robotic end-effectors such as hands or grippers to detect pressure, temperature, and/or temperature.
- Force feedback systems provide a valuable gauge of the force exerted on handling particular objects, relaying real-time data for grip adjustment.
- Machine-learning-based algorithms are often employed to process sensory inputs, allowing the robot to learn, adjust its dexterity, and optimize performance in the long term.
- Actuators help execute movement instructions and high-precision models provide delicate and deft control for intricate tasks.
Researchers Develop a Two-Finger Robotic Hand
A collaborative, international team of researchers set out to devise a robotic hand with two fingers, each with two degrees of freedom, using low-cost sensors that provide greater dexterity than robotic grippers and greater simplicity than other robotic hand technologies.
The team used a novel approach combining fused force-sensitive resistor (FSR) sensors with servo motor average current to improve grasping speed and precision. The FSR sensors were integrated into each fingertip to enhance sensitivity and object detection.

An assemblage of six objects from the Yale-CMU-Berkeley object set. Image used courtesy of Mohammadi, V., et al, 2024
A unique impedance control algorithm was employed to moderate the stiffness and damping of the robotic hand. An integrated mass-spring damping system was used to simulate impedance control by processing servomotor current values (which differed based on varying object characteristics such as stiffness) to adjust gripping pressure. The stiffness classification of objects took place in the close and load phase. The close phase represents initial contact with the chosen experiment objects and complete touch sensation), while the load phase represents the robotic grasping of objects.
Robotic gripping experimentation was trialed ten times on six objects selected from the Yale-CMU-Berkeley object set. Objects included an apple, a soft ball, both a glass and plastic cup, a small milk packet, and an empty soda can.

The Shadow Hand, jointly developed by Google DeepMind and the Shadow Robot Company. Image used courtesy of Shadow Robot
In 60 tests, the robotic hand successfully gripped and lifted the selected objects with no harm or slippage. It determined object stiffness successfully using servomotor current differences, allowing for customized force and orientation. It outperformed the baseline hand in terms of success rate, grasp force, and placement, reducing slippage and breakage. These characteristics highlight its potential for improving the accuracy of surgical procedures, prosthetic functionality, and the efficiency of automated industrial processes.
The Shadow Hand
In another collaborative venture, Google’s DeepMind (an Alphabet subsidiary) teamed up with Shadow Robot to build an intelligent, dextrous robot hand for use in AI research concerning robotic dexterity.
The Shadow Hand is extremely resilient and able to bear aggressive force and impacts. The robust nature of the solution lends well to long-running reinforcement learning experiments. This type of learning is a machine learning technique for training software to make the most optimal decisions. Although the specifics of its ruggedness are unknown, it can withstand repeated collisions and severe use.
The Shadow Hand comes with complete remote operating system integration, fail safes, and a step-by-step shutdown method. The sensors within the fingertips feature stereo camera technology and provide users with a detailed 3D visual setup. Position control loops support fingertip dexterity, and continual inertial and torque measurement provides optimum hand sensitivity to its environment.
DeepMind is not the only forward-thinking group getting savvy in the art of robotic manipulation; OpenAI is also using Shadow Hand for training bots in highly dextrous tasks to expand the boundaries of modern robot gripping and dextrous controls.








