 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinSafer Handling of Heavy Robotic Pallet Loads, Courtesy of SCHUNK
SCHUNK has expanded the lineup of couplings for robot grippers with a device designed for heavier pallets, aligning with the advent of higher-payload robots entering the market.
Industrial robotics require grippers or end effectors that grip, hold, or clamp a wide array of materials, packages, tools, and custom devices. The emerging engineering industry that revolves around this kind of product design is known as ‘end of arm tooling’ or EoAT, and SCHUNK is an established leader in this field.
SCHUNK Tool Holding
SCHUNK offers an extensive catalog of high-quality tool-holding pneumatic grippers. In this kind of process, a coupling bolts onto the robot faceplate and transfers pneumatic and electrical connections to the end effector, or the EoAT. Some couplings offer pneumatic locking mechanisms that allow automatic tool changing.
Recently, SCHUNK has added a heavy-duty coupling to their existing VERO-S NSR product line and added additional IO-Link capabilities through the coupling.
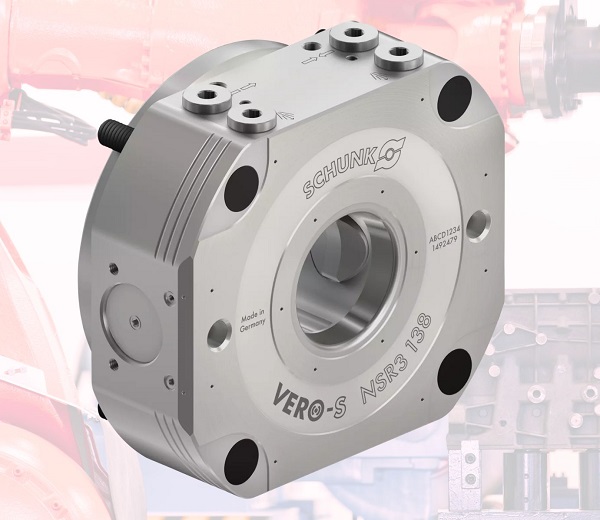
The new NSR3 138 coupling. Image used courtesy of SCHUNK
VERO-S NSR3 138 Coupling
Similar to the other VERO-S couplings, the NSR3 138 has been designed and built to handle heavy pallets for the robotic material handling industry. The NSR3 138 has the capability of handling pull-down forces of up to 8 kN, and a maximum moment of Mx = 1,500 Nm (approximately 1000 Nm more than the NSR 160) and My = 1,600 Nm. This coupling is spring-loaded, opening with 6 bar of compressed air. The NSR3 138 measures 129 mm x 112 mm x 55.7 mm, weighs only 3.8 kg, and is advertised as maintenance-free.
Most robotic applications require a highly accurate, repeatable positioning, but if the coupling that holds the tool isn’t accurate, your robot positions will not be accurate either. SCHUNK tools are well known for their reliability and accuracy, which is why the NSR3 138 has a repeat accuracy of <0.02 mm.
An integrated blow-off feature ensures that mating faces are clean and free of debris. The smallest amount of dirt could result in inaccurate positions or even tool failure.
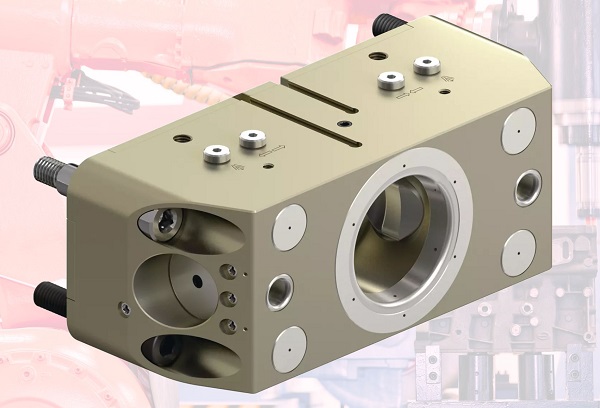
The previous coupling series from SCHUNK, the NSR 160. Image used courtesy of SCHUNK
Clamping Status and Pallet Check
When changing tools automatically, there are many status checks and digital handshakes that need to happen in order to safely exchange tools.
The NSR3 138 offers an optional monitoring unit, the AFS3-R IOL 138. This monitoring unit reports the open/closed state back to the control system, the closure status of the clamping pin, and the pallet presence. These status signals are then used to set configurable outputs or used to signal alarms. Without these signals, the control system or operator might not know if the tool is securely locked in place before moving to the next position, which may lead to damage or failure. These signals are transmitted to the control system using the IO-Link protocol.
By using the popular IO-Link protocol, SCHUNK has given engineers access to service data, process data, and diagnostic data all over the same communication channel.
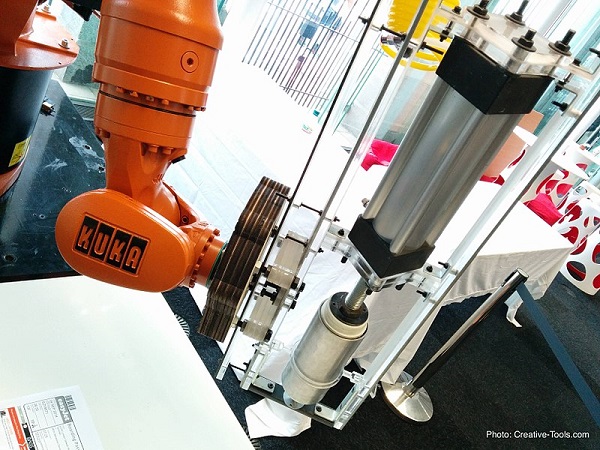
One example of a robot with an end tool, attached via a coupling. Image used courtesy of Wikipedia
Applications of Pneumatic Couplings
In many applications, a robot must use more than one tool. Such applications require either a manual or automatic tool change process. Allowing the robot to change its tool automatically requires an easily accessible tool nest, a robot coupling, and some extra programming steps.
The coupling is mounted to the robot arm’s faceplate, and the changeable tool mounts onto the mating face of the coupling. All of the pneumatic and electrical signals are transferred through the coupling via labeled ports and connectors.
When a tool needs to be changed, the robot will move to an empty nest and place the tool into the nest. Pneumatic pressure is then applied to the unlock port, and the internal signals are checked to ensure the tool is unlocked. The NSR3 138 is spring-loaded so that if air pressure is lost, the coupling will remain locked in position. At this point, the robot can make its way over to the new tool and engage the coupling locking mechanism.
The AFS3-R IOL 138 has the added benefit of using IO-Link, which has embedded diagnostic data and additional sensor data. This allows for pallet presence and clamping pin engagement status to be reported back to the PLC on the same network node.








