 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinRoboDK and Open Robotics Enhance Robotics Simulation and Programming
Robotic simulation creators RoboDK and Open Robotics have released hardware and software updates to advance robot application simulation and improve onsite integration.
Simulators enable a robot to be tested in various situations and environments without the cost of real-world time and resources. Simulations can speed up the optimization of a robot's design and code and enable offline programming.
Robot simulation creators RoboDK and Open Robotics have announced improvements to their simulations for greater ease of use and real-world likeness, further advancing the benefits of simulation.
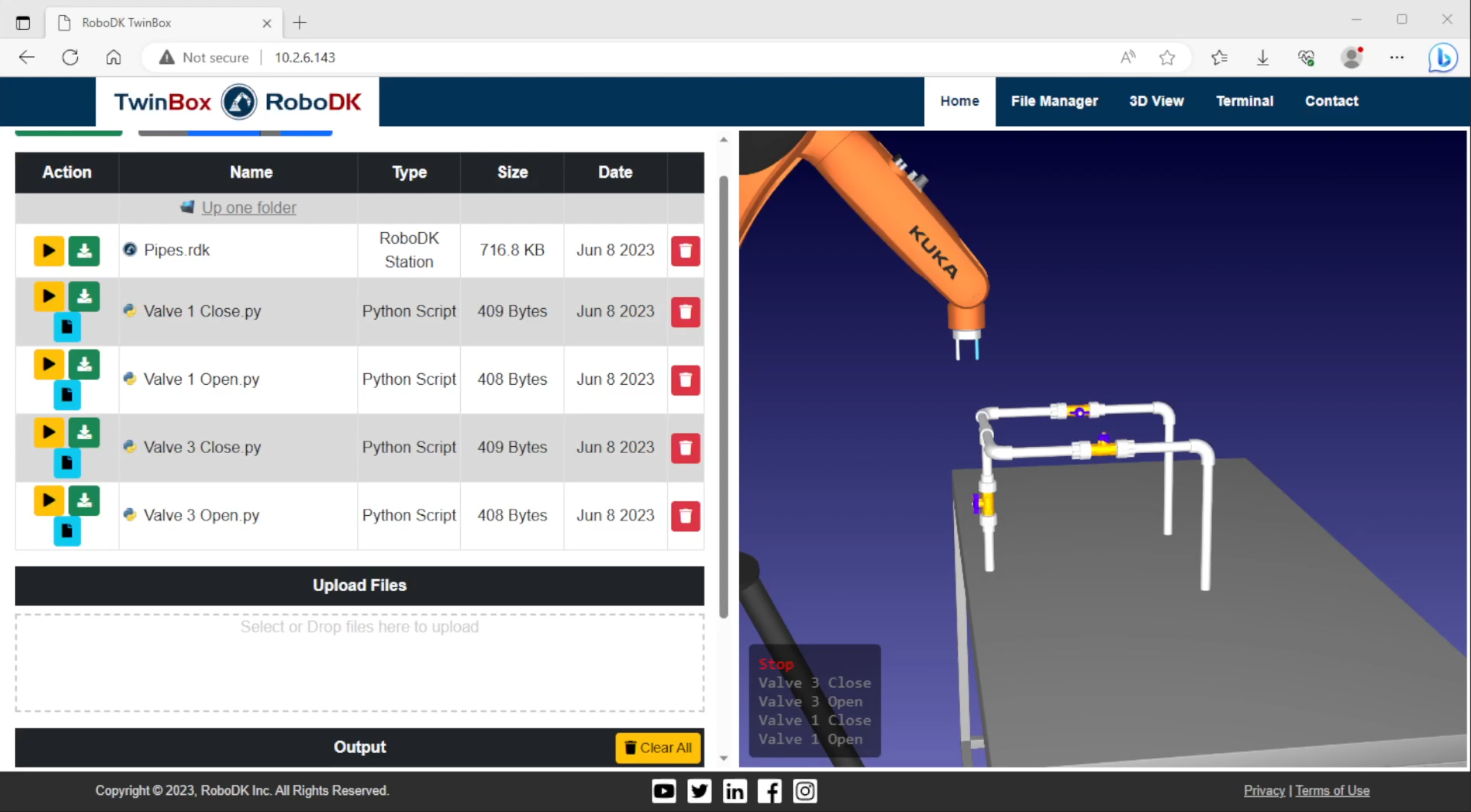
TwinBox serves as a remote interface that can be accessed through a browser. Image used courtesy of RoboDK
RoboDK TwinBox
RoboDK announced the release of its RoboDK TwinBox, a low-cost, compact solution that enables users to set up and deploy production robots in conditions where space is limited. RoboDK provides advanced software solutions for robot simulation and offline programming.
RoboDK’s TwinBox can be accessed by pre-installing RoboDK software into a single-board computer or an industrial PC. Users can control TwinBox through their web browser and do not need a local display, keyboard, or mouse. The space-saving form of the TwinBox system means that users can install it on the side of their robot(s) of choice or set it up within a robot’s control system.
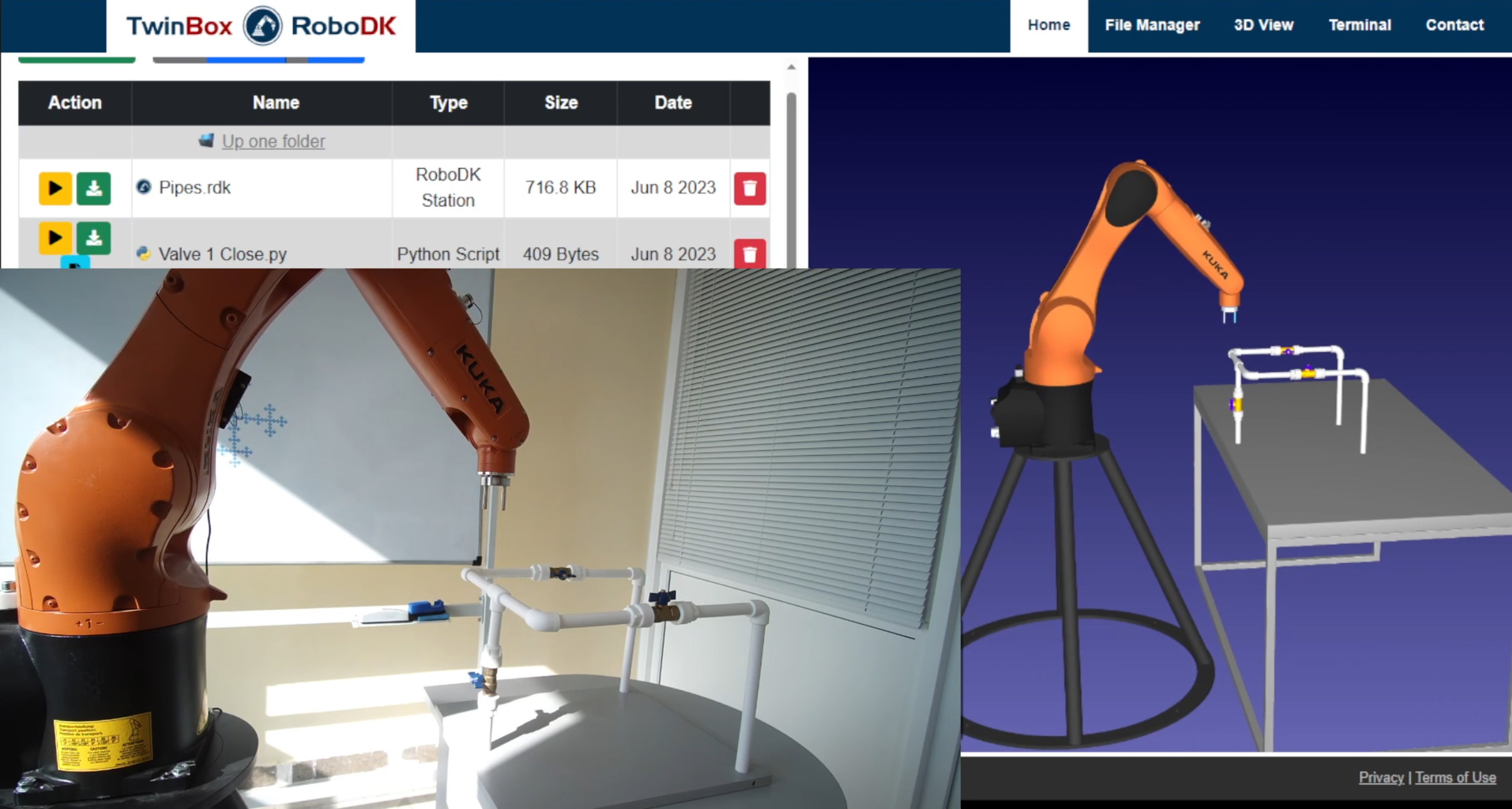
With RoboDK, users can choose from over 1,000 robots from 50 manufacturers. Image used courtesy of RoboDK
Multiple Robot Integration
Users can tap into the RoboDK library to select their robots, picking among more than 1,000 robots from 50 separate manufacturers. Unlike conventional methods of robot integration, robots belonging to different companies do not need to be individually programmed. The RoboDK TwinBox allows for the multiple integration of robots to create an interconnected, functioning system. Users can also make multiple connections with computer vision cameras and sensors.
RoboDK's TwinBox is a system designed to run all sorts of industrial and consumer-grade hardware. It is compatible with different operating systems, including Linux Debian, Windows, and Ubuntu. RoboDK even provides specialized variants for systems such as Nvidia Jetson (a set of embedded computing boards produced by Nvidia, frequently used in artificial intelligence applications) or Raspberry Pi-based industrial computers.
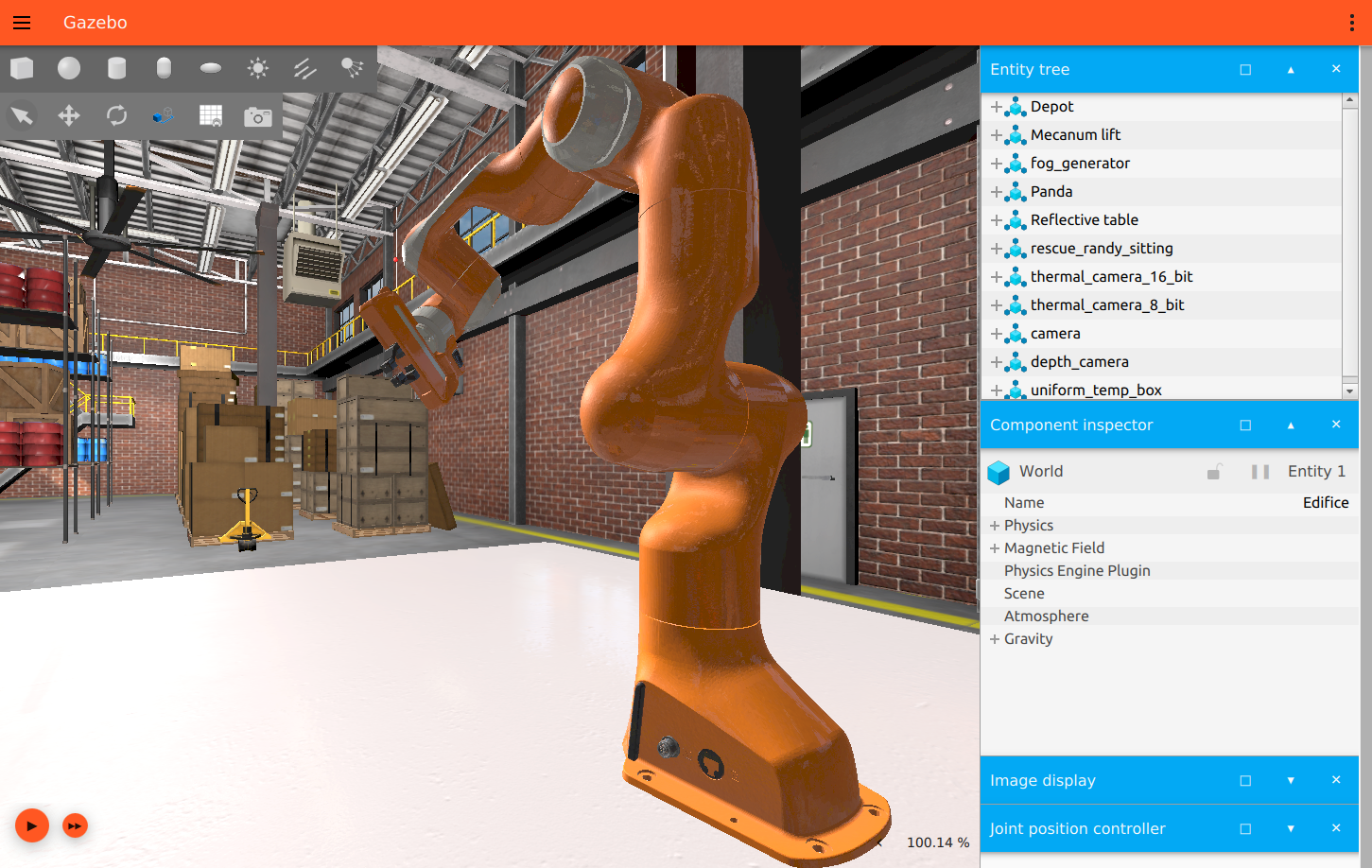
Animation demonstrating Gazebo Harmonic’s newly added mouse drag plugin. Image used courtesy of Open Robotics
Open Robotics’ Gazebo Harmonic
California-based nonprofit Open Robotics released the latest version of its open-source simulator, Gazebo. Features of the new Gazebo Harmonic are intended to enhance development and debugging, improve user experience, and advance the realism of robotic simulations.
The introduction of Python bindings in Gazebo Harmonic facilitates more adaptable and accessible plugin development. Advanced debugging and inspection tools, such as Gazebo’s command line interface to list subscribers and topics, streamline the identification and resolution of issues encountered by users engaged in algorithm development.
Furthermore, the simulation development process is made more straightforward through Gazebo Harmonic's joint mimic constraint, assisting users in representing intricate robotic mechanisms. Cameras have also seen an improvement in this release, encompassing wide-angle lens simulation and support for custom intrinsic matrices to offer users more authentic visual data essential for the testing and enhancement of vision-based control algorithms.
Gazebo Harmonics' improved cameras and optical effects make it easier to simulate real-world applications more accurately. Image used courtesy of Gazebo
Open Source Simulation
The inclusion of custom optical effects like lens flare and the integration of global illumination methods such as Voxel Cone Tracing enhance the authenticity of simulations, offering users more diverse and dynamic testing environments. Adding a new simulation environment and extra models in Gazebo Fuel further enriches the platform, providing a comprehensive space for experimenting with and validating control algorithms.
Moreover, the expanding Gazebo community, combined with installation guidelines, remote operating system integration tutorials, and assistance for transitioning from Gazebo Classic, establishes a supportive ecosystem for users utilizing the Gazebo Harmonic release. This combination of features establishes a more streamlined and effective simulation environment, facilitating the development, testing, and improvement of control algorithms.







