Using advanced sensing technology, robotic skin allows grippers and manipulators to “feel” and handle objects without damaging them. While emulating human…
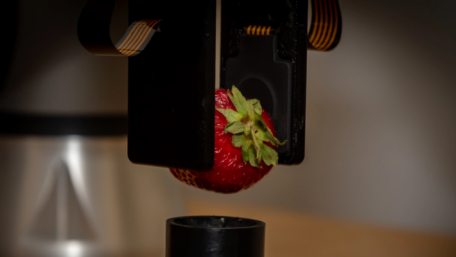
Using advanced sensing technology, robotic skin allows grippers and manipulators to “feel” and handle objects without damaging them. While emulating human touch is still in its infancy, it does show promise for future applications.

Servers are vital to the flow of information in and around organizations, acting as a hub for information transfer and…
Servers are vital to the flow of information in and around organizations, acting as a hub for information transfer and storage. Learn about the role of servers in industry and the potential challenges that come with maintaining them.

With the first fuzzy logic-based controllers on the market in 1983, learn how the Japanese-born automation company,…
With the first fuzzy logic-based controllers on the market in 1983, learn how the Japanese-born automation company, Omron, adopted fuzzy logic as a basis for the design of its current PLCs.

PLC and other automation project software can be easier and more efficient to update and maintain thanks to the…
PLC and other automation project software can be easier and more efficient to update and maintain thanks to the introduction of Git control, already a staple for typical programming of large-scale projects.

We'll run through the eight basic steps for implementing a predictive maintenance strategy in your business to improve…
We'll run through the eight basic steps for implementing a predictive maintenance strategy in your business to improve critical asset availability, reduced maintenance costs, and enhanced revenues over time.

An EOAT, located at the end of an industrial or collaborative robot arm, is entirely customizable with nearly unlimited…
An EOAT, located at the end of an industrial or collaborative robot arm, is entirely customizable with nearly unlimited possibilities. Learn about the five main methods of how EOATs are powered and the sensors that they use.

Robots are no longer unanimously just "robots"—there are specific tasks and functionality of each kind. Learn about the…
Robots are no longer unanimously just "robots"—there are specific tasks and functionality of each kind. Learn about the technology differences between fixed-location robots and mobile robots and why no one robot is like another.

Learn about the common applications, programming procedures, and safety protocols of collaborative robot work cells,…
Learn about the common applications, programming procedures, and safety protocols of collaborative robot work cells, which are often simpler and less expensive than industrial robot work cells.

There are many distributed fieldbus capabilities for valve manifolds that can save on network overhead and wiring. In…
There are many distributed fieldbus capabilities for valve manifolds that can save on network overhead and wiring. In this article, we will look at PLC programming of fieldbus manifolds highlighting Festo's CPX layout.

What if you could control the end position and the speed of a hydraulic actuator accurately with just a simple signal?…
What if you could control the end position and the speed of a hydraulic actuator accurately with just a simple signal? Some systems use simple open/close valves, but others require far more precision.

Redundancy and safety are often seen together in industrial safety systems. Safety relays monitor emergency devices to…
Redundancy and safety are often seen together in industrial safety systems. Safety relays monitor emergency devices to switch contacts based on status - but what makes them different from normal relays?

Moisture inside industrial pneumatic systems is a major cause for concern, and if the air is not filtered or dried…
Moisture inside industrial pneumatic systems is a major cause for concern, and if the air is not filtered or dried properly, it can lead to serious failures.

We've read about the capabilities of collaborative robots, but often, one question still remains - how do you program a…
We've read about the capabilities of collaborative robots, but often, one question still remains - how do you program a cobot? Last week, I got a chance to get my hands on a cobot for the first time.

Learn about specific components used in feedback devices and some of the jargon you may encounter when working with servo…
Learn about specific components used in feedback devices and some of the jargon you may encounter when working with servo motion systems.

For many manufacturing processes, Cartesian robots work well. However, there are times with a robot with more movement…
For many manufacturing processes, Cartesian robots work well. However, there are times with a robot with more movement capabilities works better. Learn about six-axis robots, how they move, and popular applications.

Learn all about the collaborative robots (cobots) that work alongside humans and the many advanced strategies put in…
Learn all about the collaborative robots (cobots) that work alongside humans and the many advanced strategies put in place so they can function efficiently and safely in industrial settings.

Vacuum pressures are not uncommon, but they can be more complicated than standard air systems. This article explores…
Vacuum pressures are not uncommon, but they can be more complicated than standard air systems. This article explores pneumatic vacuums, exploring applications, uses, and types.

When it comes to electrical grounding, many strategies are employed to accomplish different tasks. One of the main…
When it comes to electrical grounding, many strategies are employed to accomplish different tasks. One of the main reasons for grounding equipment is for the safety of users and equipment while maintaining strict adherence to regulations.

Cobots are poised to provide major breakthroughs in robot integration alongside the workforce.
Cobots are poised to provide major breakthroughs in robot integration alongside the workforce.

In this article, we take a look at hydraulic, pneumatic, and electric actuators and how they are used in different scenarios.
In this article, we take a look at hydraulic, pneumatic, and electric actuators and how they are used in different scenarios.

 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin