 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinUnderstanding Robotic Force Compensators and Compliance End Effectors
Force compensators and force compliance end effectors can expand the capabilities of traditional robotics to reach into difficult processes, ranging from grinding and alignment to precision measurement.
It is no secret that many manufacturers have recently faced problems related to skilled labor shortages and increasing demands on the sustainability front. This often leads manufacturers to look for better ways to reduce human-intensive labor and increase efficiency. An effective way for them to do this is to expand robotic capabilities in their plant processes. The use of more advanced end effectors, such as force compensators or force compliance devices can often work in such a way.
Force Compliance End Effectors
Compliance devices exist to help robots better ‘sense’ the environment they have been programmed to work within. This can include many different types of tasks, but two of the most common applications for compliance end effectors and force compensators are grinding/sanding, and part alignment.
These tasks are difficult to perform with the use of traditional robotic systems because of the need for variable force input and sensing. Compliance devices work by sensing forces and then providing feedback to the control unit. Once the control unit has the appropriate information, it can make adjustments to a robot's path or to the force exerted by the motors applied to the work.

Figure 1. A single axis force compliance tool adapter. Image used courtesy of PushCorp
Force Compensator and Compliance Applications
Force compensators and force compliance end effectors can be used in many different applications, not only grinding and part alignment. They give robotic arms or cartesian systems an enhanced way of accurately sensing the medium that they are working with. This expands the capabilities of six-axis robotics to include tasks that would otherwise need the guidance of a human hand.
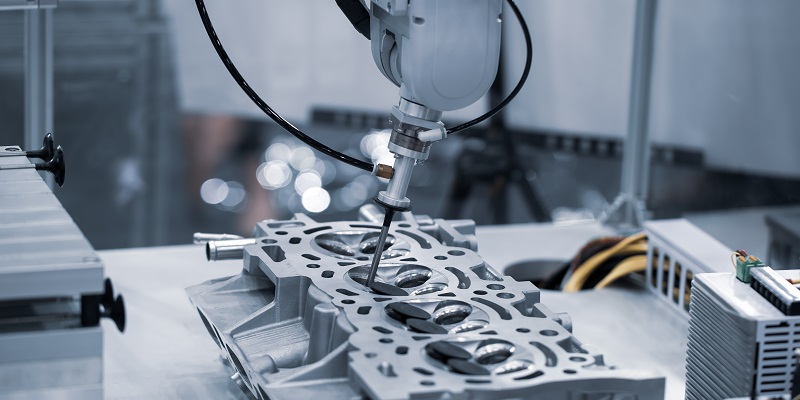
Figure 2. A six-axis robot being used in precision alignment. Image used courtesy of Adobe Stock
Robotic compliance devices offer end users many benefits depending on the application. They can help to increase productivity and reduce labor costs by freeing up human labor for other more complicated tasks. In addition, they can reduce the complexity of some robotic cells by limiting the number of tools necessary to perform certain tasks. This can also lead to greater efficiency and reduced costs with the reduction in cell complexity.
Sanding and Grinding
Sanding and grinding of parts is a traditionally difficult process to automate because abrasives need to be in contact with the part using a specific force, not always at a specific location in space relative to the center of the part. This means that some kind of sensing capability needs to be put into place in order for the robot to know how to adjust its path in order to keep the necessary constant force on the part. A force compensator is capable of doing exactly that, allowing the robot to keep the correct force on the part throughout the grinding process.
In addition, these types of compensators can aid in certain types of deburring processes and machined part cleanup. These processes experience more positional variation because it is often unknown exactly what the profile of the uncleaned part might look like; positional accuracy is not the best solution when the shape of the part contains unknown contours.
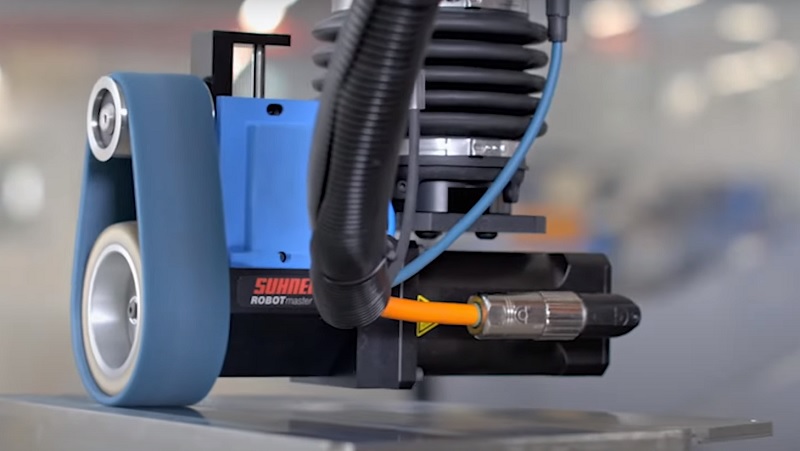
Figure 3. The Suhner EFC-02 can be used for controlled grinding and sanding. Image used courtesy of Suhner
An example of this is the Suhner EFC-02, designed by Suhner to be an active electric force compliance system. The Suhner EFC-02 can control the grinding force even on surfaces that are not uniform. Suhner was able to create this completely electric force compensator through the use of high-frequency force and acceleration measurement. The measurements are then fed through a control algorithm that can ensure a quality surface throughout the manufacturing process. It can be used in all orientations since it has six-axis measurement capabilities.
Force and Torque Sensors
Force and torque sensors should be mentioned because they are used for similar functions as compliance and force compensating end effectors. A force torque sensor sits on the end of the robot arm between the tooling and the robot. They work by accurately sensing any forces or torques present while the robot is operating. This can be used in precision alignment and for operations that need precise torque capabilities, such as placing fasteners. Force torque sensors are also used for dowel pin pavement and in sand, grinding, or deburring processes.
Robotic Compliance Devices
Robotic compliance devices are similar to force torque sensors and force compensators, but they are designed specifically for use in applications that involve part alignment and similar tasks. They work to prevent jamming associated with misalignment on precision fit parts. They can be useful for dowel pin alignment and other precision applications. There are different types of compliance devices and some can function in 6 axes while others measure horizontal compliance, vertical, or cylindrical. This gives manufacturers a broad range of devices to choose from, and they should be chosen to fit each application carefully.

Figure 4. Render of a compliance tool on the end of a robot. Note the flexible rubber fitting which can allow linear movement and rotation along three axes each. Image used courtesy of Bosch Rexroth
Bosch Rexroth has a Smart Flex Effector that offers customers several benefits in one device. The device can be used to detect tool drift over time as the end effector works over its effective lifespan. This can be translated into position correction movements to keep the process in operation even with tool drift. The device can also be used to measure products, giving manufacturers a myriad of different applications. With measuring capabilities, the compliance sensor can be used to check tolerances on parts for quality control. It can also be used to search the part before beginning work on it.
With the recent rise in the use of the Industrial Internet of Things, IIoT, and other cloud based technology, digital twins have started to become commonplace in manufacturing. The use of some compliance devices can lead to the creation of real-time digital twin feedback from measurements using the device. In addition to a digital twin, the data can be used to adapt to each part individually for more efficient operation.
Automating Difficult Tasks
Robotic force compensators and compliance end effectors can be useful tools to extend the current capabilities of a robotic cell. They offer an adaptive sensing option for some of the more challenging automation processes like precision part alignment and grinding. In addition, they can be used as measurement devices to create digital twins and for quality control. Measurement capabilities can be used to make robots adaptive to each individual part.
Careful consideration should be taken into account before the addition of a force compensator or a compliance end effector, but they can be beneficial in certain hard to automate processes. Their use may be able to help offset the costs and disadvantages associated with human labor.








