 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinMobile Robots
Aside from the category of ‘robotics’, mobile robots share very little similarity with their stationary industrial relatives. However, considering the definition of a robot, which is a machine designed to operate independently using external inputs in order to produce some sort of useful action, then mobile platforms are indeed robots.
Most of the field of mobile robotics has recently been dominated by wheeled platforms, primarily used in warehousing and logistics functions. Other common mobile applications are drones (aerial vehicles), and various other land-dwelling functions for exploration, industrial inspection, healthcare, and construction. Currently, although underwater vehicles are used around the world, fully autonomous maritime vehicles are not a large market segment, with most underwater applications being remotely controlled.
Wheeled Mobile Robotic Platforms
The most common place to see mobile platforms currently is in the context of warehousing and storage, followed by healthcare and various other capabilities such as store inventory and construction. The basic construction of most of these platforms is quite similar. Since these platforms are not guided by a remote human operator, they are autonomous, gaining the title ‘autonomous mobile robots’, or AMRs, as they will be called throughout this text.

Most AMRs are designed for stability and payload, not for speed. They often work around humans, so safety is a great design consideration. Most of these will be low to the ground, supported by a wide wheel base capable of turning, usually not traversing sideways. Being mobile, they are battery powered and must return to a charging station in the event of battery capacity draining.
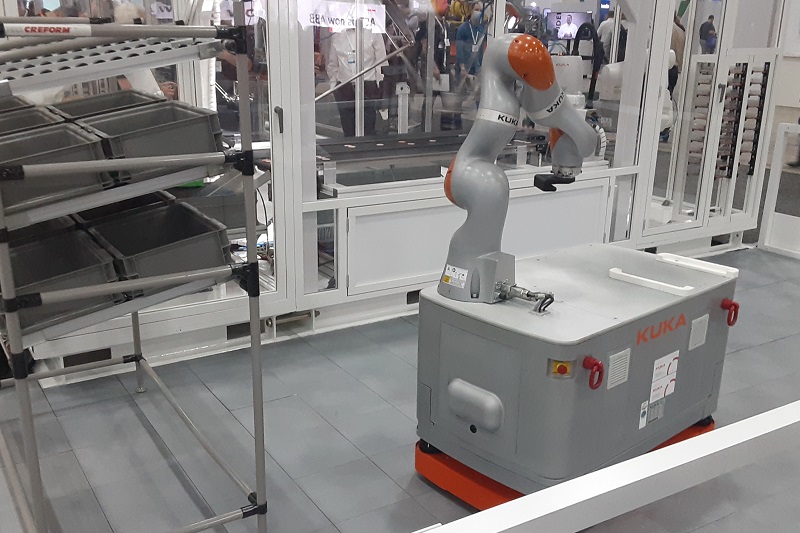
Some of these platforms are designed with permanent working surfaces, like a supply cart or a set of shelves. Sometimes, an articulated collaborative robot even sits on top. Just like with industrial robots, the function is usually the same in nature, transporting an object, picking it up, placing it, or delivering it from one place to another.
A major difference between articulated robots and AMRs is the payload, although it should be noted that both platform types are so widely varied that these statements are only generalizations, and after publishing, many industry innovations will certainly have taken place.
The payload for industrial robot arms is usually below 100 kg. Most companies designate the model number of each robot with an indicator of its payload, and not necessarily its size. In fact, many higher-payload robots are actually smaller in size than those with lower payloads, since more of the motor power can be reserved for moving the longer linkages without having to step up to larger motors. Heavy payload with a small footprint allows efficient handling without taking up much shop floor space.

Mobile platforms, on the other hand, have payloads that are commonly well into the hundreds, or even above 1000 kg. These AMRs usually lift vertically, supporting the entire payload weight between the strong wheels, with no counter-balance required as with many heavy-payload arm designs. Once again, it should be noted that there are also articulated arms with several thousand kg payloads (over 5000 lb), which is nothing short of amazing.
AMR Design Challenges
A few design challenges certainly affect AMRs differently than other robots. Battery power must be conserved for long duty cycles between charges. Since they are supported by the floor, and they actually must have a heavy weight to keep a low center of gravity, they can be powered with large batteries. This center of gravity is a second challenge. When carrying a tall load of shelves or a cart with items stacked on it, any quick turns or slight angles on the floor can cause the robot to tip over or dump its load on the ground.

Some of these problems can be solved by the robot design. Many AMRs turn in place rather than turning around a corner as a car might. This keeps the load from dangerously tilting, which can happen even at low speeds. As for the angle of the floor, the AMR designer can’t solve that problem, but sensors can be installed to detect the distance to the floor below the robot, and if that distance increases, this means that an angle or edge is too close. This prevents the robot from accidentally traveling up or down loading ramps, or reaching the edge of a stairway.
There is one major design consideration for AMRs, although it is not surprising: safety. As these platforms navigate among obstacles and people, they must have proper collision avoidance capabilities to not only finish the task but remain safe for equipment and workers.
Finally, powering a mobile platform has always been a challenge for electrical engineering. Larger batteries lead to greater weight, which requires large motors, and the cycle continues. Powering the large batteries through the application of autonomous docking and charging stations is a requirement for any efficient fleet of mobile platforms.

AMR Collision Avoidance Methods
Collision avoidance follows two separate models, both existing in the operating system side-by-side.
The first model maps out the fixed obstacles to create a floor plan of the room or area. This includes the pickup and dropoff points, and any other permanent fixtures like walls, doorways, conveyors, etc. Sometimes this data can come from a detailed CAD layout, but this is unavailable in all but the most modern facilities. Instead, mapping sensors such as LiDAR (light distance and ranging), ultrasonic, and camera vision can all be employed to create a map of the environment.
This mapping concept is called ‘simultaneous localization and mapping’ (SLAM) and must track both the current position of the device, while also retrieving data about the environment. This technology is increasingly accessible, being found on modern smartphones (with LiDAR cameras) to map the insides of rooms and identify objects with ease. Adding dimensions to these point cloud maps creates an entire 3D environment used to teach the robot where to navigate and how to avoid these fixed obstacles.
The second challenge facing collision avoidance is dynamic (moving) obstacles. Forklifts, humans, and other AMRs are certainly not something to add to a SLAM map of the environment as those locations are not to be avoided every time, just once in a while. If all moving obstacles were added continuously to a point cloud map, there would quickly become no navigable routes and the robot would stop moving entirely.
To sense temporary obstacles and people, arrays of sensors are mounted to the front, sides, and back of the robot. If the payload is tall, the sensors must be able to detect objects up to that height. Many types of sensors are often required, working in conjunction to ensure nothing is missed. IR detection can emit and reflect light to detect distances, passive IR cameras can detect people and heat-emitting objects, and ultrasonic can rely on sound to detect transparent objects (windows, glass doors, etc). Each of these methods provides critical insight, but they also have some critical flaws, which is why it is a rare case when only one type of sensor is used for proximity detection.

Using cameras together with artificial intelligence (AI) can be a major benefit to this field of mapping. Cameras along only provide a 2-dimensional picture of a surrounding space. The advent of 3D cameras provided a perspective image, which can be seen as you ‘move’ around an image like a virtual reality environment, but cameras alone still lack any ability to perceive objects and distances. The world of AI is advancing so rapidly that many things that were impossible only a few years ago are now common. Allowing an AI engine to process a picture and identify every single aspect of that image is really not far from reality. There are still some challenges that may be difficult to overcome, such as mapping from a single 2D image, but with the pace of AI technology, it’s hard to predict what the next few years will bring.
The Difference Between AMRs vs AGVs
To make an official note at the beginning of this discussion: here in 2023, there are several leading acronyms to indicate types of robots. Those types and acronyms are absolutely expected to change over the years as evolving technology causes some methods to become obsolete while others are developed. These terms may not be the leading categories in future years, and that is understood.
AMR, as we have discussed, begins with the term autonomous, which means that input signals and decisions drive the operation, while the ultimate goal is the end task of transportation of a payload. AMRs follow a mapped layout of the path while navigating around fixed and temporary obstacles.
AGV, in contrast, stands for ‘automated guided vehicle’. Automation is still the true purpose - it drives with minimal human intervention after the initial setup. The purpose is to relieve people of monotonous tasks, so it wouldn’t make sense to invest in automation while also keeping people on board to simply follow the robot and control it like a fancy RC car. When we look at the phrase ‘automated guided’ it tells us that there is, in fact, a guided path followed by the robot, but it performs the task by itself.
In many AGV systems, a hidden track lies just under the concrete floor, providing a motion ‘lane’ for the robot to travel within, and that lane stays clear of people. Sometimes, the guidance comes in the form of large markers: QR codes or bar codes on a wall or floor. The robot is able to scan these codes to receive new waypoint instructions. This robot is not truly autonomous, yet it is still following a path influenced by an external signal, so the two systems provide many of the same benefits to a logistics setting.
While AMRs may be more expensive, having more advanced sensors and obstacle processing / mapping algorithms, the AGV requires additional facility infrastructure that may be equally costly to apply. Neither system is a small investment that can be adopted lightly - both require careful planning and coordination with OEMs and integrators to provide a valid solution.
Aerial Vehicle Platforms (UAVs)
Unmanned aerial vehicles, or UAVs, are usually referred to simply as ‘drones’, although this name is sometimes applied to ground or water-based vehicles as well. The aerial platforms known as UAVs usually rely on a combination of vertical propellors that can provide balance and stability, and, when paired with the proper sensors, an astounding navigational capability.

When robots travel on the ground, simply stopping the motors is enough to hold the robot steady. Obstacles approach only in a 2D plane around the robot (nearly 2D at least, the height of the robot adds a limited 3rd dimensional sensing field). But drones are different in nearly every aspect.
Flying platforms are subject to forces of wind and updrafts even when stationary. Obstacles must be monitored in all directions, especially when ascending or descending in elevation. Since constant power is required even while light weight is essential, the battery powering the platform is compact but very limited. While ground-based AMRs can achieve run times of many hours, drones are rarely seen flying more than a few minutes, opting instead for small, swappable batteries that can be recharged on the ground while the robot is flying on a new battery.
Where are UAVs Used?
Since UAVs are air-based vehicles, any application that requires visibility and access above ground is an ideal application. Inspection of construction and development zones, infrastructure (dams, chemical storage tanks, etc), counting of livestock or wildlife (although there are legitimate concerns with UAV noise scaring animals), application of agricultural applications (fertilizer, pesticide, etc in small batches).
Since they can traverse rough terrain very easily, they are also used in unfavorable conditions like search and rescue in mountainous terrain or for scouting around wide, road-less geographies for any number of law enforcement, research, or industrial applications.

These tasks were all human-performed before, and still are in many cases. Monitoring animals by helicopter still produces unwanted noise, and crop dusting planes are still the norm for ag applications. But as drone technology allows longer flight times with heavier payloads, the task list allowed by the FAA for these applications is sure to increase.
A major benefit of drones is the rapid deployment and small space required to launch and return. A small pickup truck can park by a road, the driver can get out and sit on the back of the tailgate while piloting and monitoring the actions of the drone. Features such as an automatic return-to-home when the battery drops and pre-set flight paths make them a great choice for these sorts of applications. Compared to a helicopter or plane, plus the investment in the flying license, UAVs are extremely inexpensive, even for the most advanced models.
Limitations of UAVs
With these benefits, why then do we not see drones being applied ubiquitously in every one of these applications? For the moment, a few main obstacles stand in the way, some more objective than others.
The flight time and payload capability of the designs are primary limiting factors in how accessible drones might be. Short-range, light-duty is just fine, but for use in actually transporting materials or covering large distances can still be very challenging.
Second, FAA regulations are still in constant flux about how, when, where, and under what conditions these UAVs can fly, as well as how to certify pilots. This process is sure to become more streamlined, with concrete definitions and terms applied as the understanding of the technology advances. This is certainly not unique to UAVs, and regulatory growing pains like this are often encountered early in a technology life cycle.
Finally, a more subjective challenge is the legitimate concerns of the population when given the notion of a fleet of overhead cameras with unlimited access to AI identification and data. The concern now becomes personal security. If drones can be used for inspection or counting wildlife populations, what is to prevent these devices from looking into windows and backyards, collecting information about your family and your actions?
This analysis is not meant to foster undue fear or suspicion, however, technology always provides the capability for unethical applications. Questions and concerns of those affected must absolutely be addressed before there will be widespread acceptance of any rapidly advancing technology.
Other Mobile Robotic Platforms
Several other robotic platforms exist today, and many more will doubtlessly appear in the future.
One recent trend is construction robots. However, rather than handling lumber and sheets of glass, these robots are used to mark the floors with layout guides, instructions, and data that is valuable for communication between contractor teams. Allowing a robot with paint or laser marking abilities to scan a large flat concrete slab and lay out the position of every wall, doorway, pipe, and electrical conduit before the work begins can be an invaluable tool, reducing the time for re-builds due to miscommunication or redesign updates. Any updates can simply be sent to the robot which can return to a location and adjust a placement by inches or feet as a design requires.
Some designs are not new entirely, but they exist as combinations of reliable technology. One such example is a mobile platform outfitted with a collaborative robot arm. This partnership is still safe for work near humans, and can aid in the manipulation of tasks across a much larger geographical range than a fixed robot base. Extra challenges are certainly unsurprising, such as batter power requirements, navigating to points in space when the base is in motion, and the extra force and inertia of a moving payload on top of a cart.
Pipeline inspection robotics is another common trend. These are difficult to categorize as ground or liquid dwelling, since they can sometimes operate in harsh wet environments. They can squeeze through pipes to investigate cracks or aging infrastructure and provide early warning of costly failures. Due to the geometry of internal pipes, the drive mechanisms are quite various, and pretty novel for typical mobile robots.
Undersea robotics, as mentioned at the beginning, is one area ripe for further innovation. While most undersea vessels are simply unmanned remotely operated vehicles, they may not be classified strictly as ‘robots’, yet many are provided with automated guidance algorithms for various purposes. Mapping the sea floor, exploring for resources, and analyzing ecosystems are great applications for small autonomous vehicles set on repetitive tasks. Many of these devices are tethered to a ship for access to power and a lifeline in case of failure, so the design requirements of battery life and data transmission are not always as difficult to achieve.
Surely, as the technology gets smaller and more accessible to more engineering designers, there is no limit to the areas in which mobile robotics will benefit industry, academics, and even the personal enjoyment of enthusiasts who wish to design something to let them see and explore something previously unseen. What a fun challenge!
